Imagine capturing an entire construction site—every beam, every corner, every elevation change—in a fraction of the time traditional surveying methods require, all while carrying equipment no heavier than a hiking backpack. Mobile 3D Mapping: Creating Accurate Digital Twins for Indoor and Outdoor Surveys has transformed how surveyors, engineers, and construction professionals document the built environment in 2026. Gone are the days of bulky tripod-mounted scanners that require hours of setup and repositioning. Today's mobile mapping systems combine lightweight portability with professional-grade accuracy, enabling rapid data capture that seamlessly transitions from outdoor building facades to interior spaces without workflow interruption.
This technological revolution matters because construction and development projects demand faster turnaround times, tighter budgets, and more detailed documentation than ever before. Mobile 3D mapping systems integrate cameras, LiDAR sensors, and positioning technology on platforms that surveyors can carry by hand, wear as backpacks, or mount on vehicles.[1] These systems generate dense point clouds and photorealistic 3D models that serve as digital twins—virtual replicas accurate enough for design validation, progress monitoring, and facility management throughout a building's lifecycle.
Key Takeaways
- 📱 Mobile mapping systems combine LiDAR, cameras, and GNSS positioning on handheld, backpack, or vehicle-mounted platforms for rapid indoor and outdoor data capture
- 🎯 Sub-centimeter accuracy enables detailed infrastructure analysis, safety audits, and BIM integration without repeated field visits
- ⚡ Faster workflows require fewer scanning passes compared to static methods, reducing project timelines while maintaining professional precision
- 🔄 Regular updates allow periodic digital twin refreshes that detect structural changes, wear patterns, and construction progress early
- 🏗️ Flexible deployment supports diverse environments from housing developments to transportation infrastructure using the same core technology
Understanding Mobile 3D Mapping Technology for Digital Twin Creation
What Makes Mobile Mapping Different from Traditional Survey Methods
Traditional surveying relies on static laser scanners positioned at fixed locations throughout a site. Surveyors must carefully plan scan positions, set up heavy equipment at each point, wait for scans to complete, then move everything to the next location. This process works well for small, controlled environments but becomes time-consuming and expensive when documenting large facilities or outdoor construction sites.
Mobile 3D mapping flips this approach entirely. Instead of bringing the environment to the scanner, the scanner moves through the environment. Continuous data capture happens as the surveyor walks, drives, or navigates through spaces, with sophisticated algorithms processing movement and position in real-time.[1]
The core difference lies in three fundamental capabilities:
| Feature | Static Scanning | Mobile 3D Mapping |
|---|---|---|
| Setup Time | 5-15 minutes per position | Immediate start |
| Coverage Method | Multiple fixed viewpoints | Continuous path capture |
| Equipment Weight | 15-40 kg (tripod + scanner) | 3-12 kg (handheld/backpack) |
| Indoor/Outdoor Transition | Separate workflows | Seamless integration |
| Data Processing | Position-by-position registration | SLAM-based continuous alignment |
Core Technologies Behind Mobile 3D Mapping Systems
Modern mobile mapping platforms integrate multiple sensor technologies working in perfect synchronization. Understanding these components helps surveyors select appropriate systems for specific project requirements.
LiDAR (Light Detection and Ranging) forms the geometric foundation. Rotating laser sensors emit millions of pulses per second, measuring the time each pulse takes to bounce back from surfaces. This creates point clouds—collections of millions of precisely positioned 3D coordinates that define every visible surface.[1]
High-resolution cameras capture color and texture information that transforms raw geometric data into photorealistic models. The quality of these cameras directly impacts the final digital twin's usability. Increased pixels per frame produce sharper textures, better-defined boundaries, and more detailed mesh reconstructions.[1] High-resolution capture reduces interpolation errors during photogrammetry processing and enables detection of micro-cracks, surface wear, and other subtle features that affect infrastructure integrity over time.
GNSS (Global Navigation Satellite System) receivers provide absolute positioning for outdoor surveys, anchoring the entire dataset to real-world coordinates. This georeferencing capability allows seamless integration with existing GIS datasets, CAD drawings, and planning documents.[4]
IMU (Inertial Measurement Unit) sensors track orientation, acceleration, and rotation. These measurements help the system understand exactly how it's moving through space, even when GNSS signals are unavailable indoors.
SLAM (Simultaneous Localization and Mapping) algorithms tie everything together. SLAM processes sensor data in real-time, determining the scanner's position while simultaneously building the 3D map.[1] This computational approach enables accurate mapping without pre-positioned reference targets or external tracking systems.
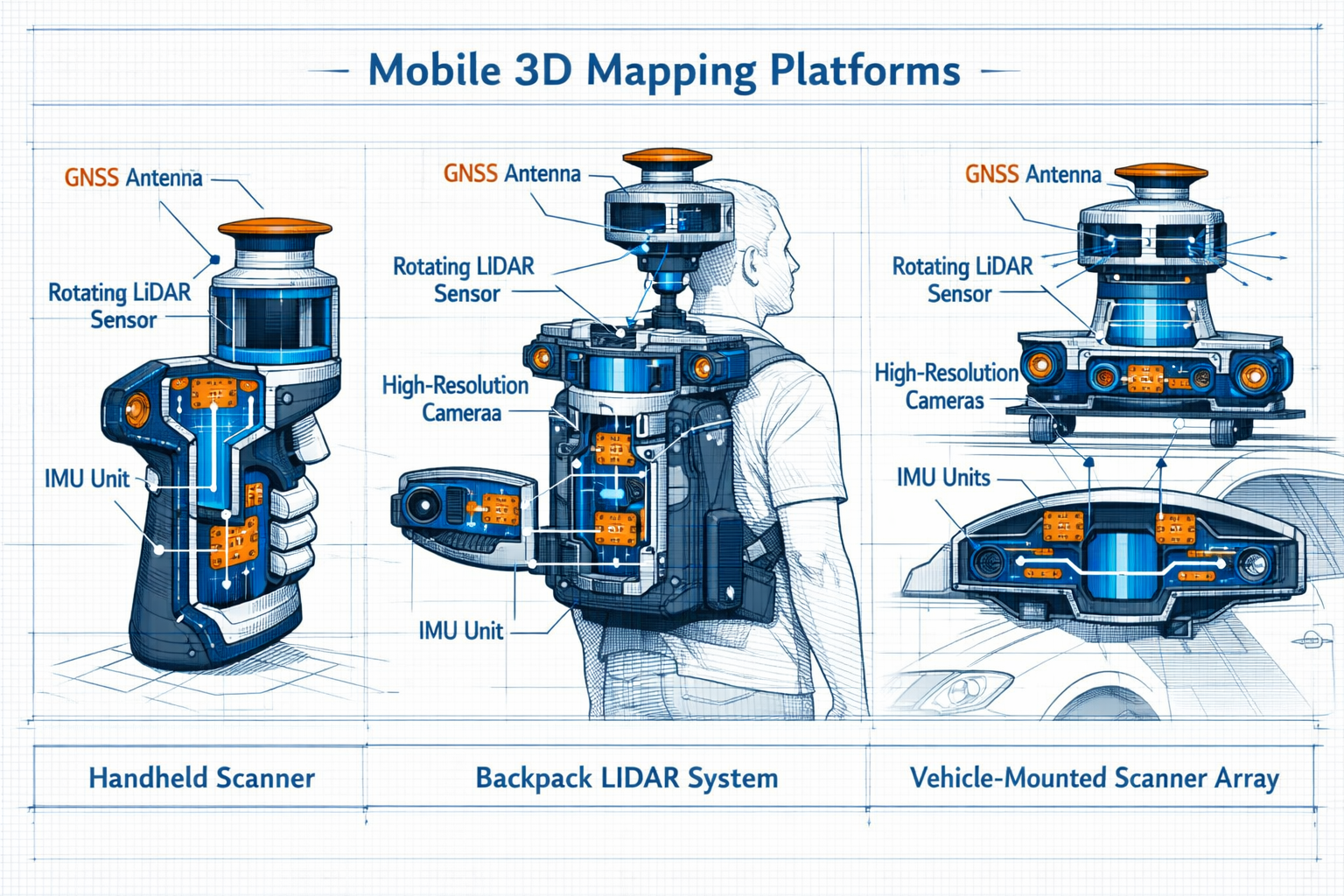
Platform Types: Handheld, Backpack, and Vehicle-Mounted Systems
The flexibility of mobile 3D mapping comes from diverse platform options suited to different environments and project scales.
Handheld scanners like the BLK2GO offer maximum maneuverability in tight spaces. Surveyors can navigate narrow corridors, climb stairs, and capture detailed measurements in areas where larger equipment won't fit. These devices typically weigh 2-4 kg and can be operated single-handed, making them ideal for detailed building surveys and interior documentation.[2]
Backpack systems such as the NavVis VLX3 balance portability with high-density data capture. Worn like hiking packs, these systems distribute weight comfortably across the shoulders while mounting multiple cameras and LiDAR sensors at optimal heights for comprehensive coverage. Backpack platforms excel at continuous mobile mapping through large facilities, capturing both indoor and outdoor environments without interruption.[2]
Vehicle-mounted arrays extend mobile mapping to road networks, infrastructure corridors, and large outdoor sites. Mounted on cars, trucks, or specialized survey vehicles, these systems capture kilometers of data per hour at highway speeds while maintaining professional accuracy standards.
Robotic platforms represent the newest category. Quadruped robots and wheeled rovers access restricted spaces, hazardous environments, and low-clearance areas where human operators cannot safely work. These autonomous or remotely operated systems expand survey capabilities into previously inaccessible locations.[2]
Mobile 3D Mapping: Creating Accurate Digital Twins for Indoor and Outdoor Surveys – Implementation Best Practices
Planning Your Mobile Mapping Survey Strategy
Successful mobile 3D mapping projects begin with thoughtful planning that considers project objectives, site conditions, and deliverable requirements. Unlike traditional surveys where scan positions are predetermined, mobile mapping requires route planning that ensures complete coverage without excessive overlap.
Define coverage requirements first. Identify which areas need detailed documentation and which require only general context. Construction sites often need high-resolution scans of active work zones while surrounding areas may need only basic geometry. This prioritization optimizes field time and data processing resources.
Assess lighting conditions before deployment. While modern systems handle varied lighting better than earlier generations, extreme conditions still present challenges. HDR (High Dynamic Range) imaging capability improves mapping accuracy in environments with dramatic lighting changes, such as transitions from bright outdoor scaffolding to shadowed building interiors.[1] HDR reduces the need for repeated scanning passes by capturing detail in both bright and dark areas simultaneously.
Plan walking paths that maximize coverage efficiency. Closed-loop paths—routes that return to their starting point—help SLAM algorithms minimize drift and improve overall accuracy. For large sites, plan multiple overlapping loops rather than single long traverses.
Coordinate with active construction to schedule scanning when site conditions are stable. Mobile mapping's speed advantage means surveyors can often capture entire floors during lunch breaks or shift changes, minimizing disruption to ongoing work.
Camera Features That Ensure Digital Twin Accuracy
The cameras integrated into mobile mapping systems do far more than add pretty colors to point clouds. They directly impact measurement accuracy, feature detection, and the long-term usability of digital twins.
Resolution matters tremendously. Higher megapixel counts capture finer surface details, enabling accurate texture mapping even when viewing models at close range. For structural surveys that require defect documentation, high-resolution imagery reveals cracks, staining, and material degradation that might be missed with lower-quality cameras.[1]
Multi-camera synchronization prevents temporal drift and frame mismatches when combining visual data with LiDAR or GNSS inputs. Unsynchronized cameras create ghosting artifacts, blurred edges, and geometric inconsistencies that compromise measurement accuracy.[1] Professional systems timestamp all sensor data to microsecond precision, ensuring perfect alignment during processing.
Frame rate affects motion blur and coverage completeness. Higher frame rates capture more images per meter traveled, reducing gaps in texture coverage and improving photogrammetry reconstruction quality. This becomes especially important when documenting complex architectural details or mechanical systems.
Global shutter technology eliminates rolling shutter distortion that occurs when cameras capture different parts of an image at slightly different times. For moving platforms, global shutters ensure geometric accuracy even when scanning while walking at normal pace.
Data Capture Techniques for Indoor Environments
Indoor mobile mapping presents unique challenges that require specialized techniques for optimal results.
Maintain steady walking speed throughout capture. Sudden stops, quick turns, or irregular movement confuse SLAM algorithms and degrade accuracy. Professional operators develop a smooth, consistent pace—typically around 1 meter per second—that balances coverage speed with data quality.
Capture loop closures by returning to previously scanned areas from different angles. When the system recognizes the same features from new perspectives, it refines position estimates and reduces accumulated drift. For building interiors, this means walking through doorways into rooms, completing a circuit, then exiting through the same doorway.
Include vertical transitions carefully. Stairs, ramps, and elevators require special attention because vertical movement amplifies positioning errors. Pause briefly at landings to let SLAM algorithms stabilize before continuing.
Maximize feature visibility by ensuring the scanner's sensors have clear views of walls, ceilings, and architectural details. Walking down the center of corridors provides balanced coverage of both sides. In large open spaces, follow perimeter paths before crossing through the middle.
Document mechanical and electrical systems that support facility management. For stock condition surveys and ongoing maintenance planning, capturing HVAC equipment, electrical panels, and plumbing fixtures creates valuable as-built documentation beyond basic room geometry.
Outdoor Survey Workflows and Georeferencing
Outdoor mobile mapping leverages GNSS positioning to create georeferenced digital twins that integrate seamlessly with GIS databases and site planning tools.
Establish control points before starting outdoor surveys. While GNSS provides absolute positioning, surveyed ground control points improve accuracy and enable quality validation. Placing temporary targets at known coordinates throughout the site allows post-processing software to refine the entire dataset.
Monitor satellite visibility during capture. GNSS accuracy depends on receiving signals from multiple satellites simultaneously. Urban canyons, dense tree cover, and building overhangs can block signals, causing position jumps or drift. Professional operators note areas with poor GNSS coverage and plan additional loop closures or control points to compensate.
Combine vehicle and pedestrian capture for comprehensive site documentation. Vehicle-mounted systems efficiently map road networks, parking areas, and large open spaces, while backpack or handheld platforms capture building approaches, landscaping details, and pedestrian areas.[3]
Document infrastructure assets systematically. For transportation projects and drainage surveys, capturing utility covers, drainage inlets, signage, and pavement markings creates valuable asset inventories alongside geometric models.
The Northstowe housing development project in the UK demonstrates outdoor mobile mapping at scale. Over 40,000 high-resolution aerial photographs created a true-to-scale 3D digital model and 2D map as of summer 2025, with 1,750 completed homes visible and measurable in the model. All data is fully georeferenced, allowing seamless integration with existing GIS datasets and CAD drawings.[4]
From Point Clouds to Operational Digital Twins
Processing Raw Scan Data into Usable 3D Models
Raw mobile mapping data consists of billions of individual points and thousands of photographs. Transforming this information into actionable digital twins requires sophisticated processing pipelines.
Point cloud registration aligns all captured data into a single coherent coordinate system. SLAM algorithms perform initial registration during capture, but post-processing refines this alignment using loop closure detection, control point matching, and multi-pass optimization. The result is a unified point cloud where every point's position is known to within centimeters or millimeters.
Noise filtering removes erroneous points caused by reflections, moving objects, or sensor artifacts. Automated algorithms identify and eliminate points that don't fit surrounding geometry, while preserving legitimate surface details.
Mesh generation converts point clouds into continuous surfaces. Meshing algorithms connect nearby points into triangular faces, creating solid 3D models suitable for visualization, measurement, and analysis. High-quality meshes preserve sharp edges, small features, and surface texture details.
Texture mapping applies photographic imagery to mesh surfaces, creating photorealistic models. The system projects camera images onto 3D geometry, blending multiple overlapping photographs to create seamless textures. This process benefits enormously from high-resolution cameras and HDR capability, which ensure consistent color and detail across varied lighting conditions.[1]
Classification and segmentation organize point clouds by object type. Machine learning algorithms identify walls, floors, ceilings, doors, windows, furniture, and equipment, labeling each point accordingly. This semantic information enables automated measurements, quantity takeoffs, and BIM model generation.
Integrating Digital Twins with BIM and GIS Platforms
The true value of digital twins emerges when they integrate with design, planning, and management systems.
BIM (Building Information Modeling) integration connects as-built reality capture with design intent. Processed point clouds serve as reference data for creating or updating BIM models in Revit, ArchiCAD, or other platforms. For commercial building surveys, comparing design models against captured reality reveals construction deviations, coordination conflicts, and quality issues.
Modern workflows like geoConvergence's Scan2Twin system control the full pipeline from raw LiDAR point clouds through BIM processing to operational deployment. Rather than treating digital twins as visualization tools alone, these systems structure data around assets, work orders, and space use—making them practical tools for daily facility operations.[2]
GIS integration extends digital twins beyond individual buildings to campus, district, and city scales. Georeferenced point clouds merge with existing GIS databases containing property boundaries, utility networks, topography, and planning data. This integration supports structural engineering analysis, infrastructure planning, and regulatory compliance.
ArcGIS Indoors deployment transforms digital twins into interactive wayfinding and space management platforms. The Scan2Twin system, demonstrated publicly for the first time at Geo Week 2026 (February 16, 2026, 3-4 PM, Booth #535, Denver Convention Center), showcases workflow transformation from raw scans to operational digital twins, including turn-by-turn indoor routing to assets, work order visualization in spatial context, and space management tools.[2]
Achieving Sub-Centimeter Accuracy for Professional Applications
Accuracy requirements vary by application, but many professional uses demand sub-centimeter precision—measurements accurate to within 5-10 millimeters.
Multi-sensor fusion achieves this precision by combining LiDAR geometry with photogrammetric reconstruction and GNSS positioning. Each sensor type has different error characteristics, and sophisticated algorithms leverage their complementary strengths while minimizing individual weaknesses.
Control network densification improves accuracy through surveyed reference points. Even when GNSS provides good absolute positioning, adding local control points throughout the survey area constrains errors and prevents drift accumulation.
Environmental correction accounts for atmospheric conditions, temperature, and other factors that affect laser ranging accuracy. Professional systems apply real-time corrections based on weather data and sensor calibration.
Digital twin technology now enables remote analysis of transportation infrastructure with sub-centimeter accuracy, sufficient for detailed road safety audits that identify hazards like poor sightlines or dangerous curves without field visits.[3] This precision level supports engineering analysis, construction quality control, and regulatory compliance across diverse applications.
Privacy, Compliance, and Data Security Considerations
Mobile mapping systems capture everything visible along their path, including people, vehicles, license plates, and other potentially sensitive information.
Automated anonymization addresses privacy concerns by detecting and blurring faces, license plates, and other personally identifiable information (PII) during processing. The Scan2Twin system includes automated anonymization ensuring PII and HIPAA compliance where required, addressing privacy concerns in facility documentation.[2]
Access control limits who can view, edit, or share digital twin data. Enterprise platforms implement role-based permissions, ensuring sensitive building information reaches only authorized personnel.
Data retention policies define how long captured imagery and point clouds are stored. Many organizations establish retention schedules that balance documentation needs against privacy obligations and storage costs.
Secure transmission and storage protect valuable digital assets from unauthorized access. Encrypted data transfer, secure cloud storage, and backup procedures prevent data loss and maintain client confidentiality.
Real-World Applications and Industry Use Cases

Construction Progress Monitoring and Quality Control
Mobile 3D mapping revolutionizes how construction teams track progress and verify quality throughout project lifecycles.
Weekly or monthly scans document construction progress with unprecedented detail. Comparing sequential digital twins reveals exactly what work occurred between capture sessions, enabling accurate progress billing and schedule validation. For drone surveys combined with mobile mapping, this multi-scale approach captures both overall site context and detailed interior conditions.
As-built documentation captures final conditions before project closeout. Rather than relying on marked-up drawings or manual measurements, digital twins provide comprehensive geometric records that support facility management, future renovations, and warranty claims.
Quality verification compares constructed conditions against design intent. Automated deviation analysis highlights areas where walls, columns, or MEP systems vary from specified locations, enabling early correction before subsequent trades build upon errors.
Clash detection identifies coordination conflicts between trades. When mechanical, electrical, and plumbing systems are captured in 3D, overlaps and clearance violations become immediately apparent, preventing costly rework.
Facility Management and Space Planning
Digital twins extend their value long after construction completion, supporting ongoing building operations.
Asset management links physical equipment to maintenance records, warranties, and operating manuals. When facility managers can click on a pump, valve, or electrical panel in the digital twin to access service history and specifications, maintenance becomes more efficient and equipment lifespan extends.
Space utilization analysis tracks how buildings are actually used versus designed capacity. Periodic updates detect furniture changes, office reconfigurations, and occupancy patterns that inform space planning decisions.
Emergency preparedness provides first responders with detailed building layouts, access routes, and hazard locations. Digital twins showing current conditions prove invaluable during fire, medical, or security emergencies.
Move planning visualizes furniture layouts, equipment placement, and circulation patterns before physical changes occur. Testing configurations virtually saves time and prevents expensive mistakes.
Infrastructure Assessment and Transportation Planning
Transportation agencies and infrastructure owners leverage mobile mapping for comprehensive asset management.
Road condition assessment documents pavement quality, signage placement, and safety features. Vehicle-mounted systems capture entire road networks at highway speeds, creating baseline datasets for maintenance planning and regulatory compliance.[3]
Bridge and tunnel inspection uses mobile mapping to supplement traditional inspection methods. While not replacing hands-on evaluation, digital twins provide detailed geometric records that track structural changes over time and support engineering analysis.
Utility corridor documentation maps above-ground infrastructure along rail lines, pipelines, and transmission routes. Regular updates detect encroachment, vegetation growth, and unauthorized construction that threaten infrastructure safety.
Pedestrian infrastructure audits evaluate sidewalk conditions, accessibility compliance, and safety features. Backpack-based mobile mapping captures curb heights, ramp slopes, and obstacle clearances that affect mobility for people with disabilities.
Heritage Preservation and Historic Building Documentation
Cultural heritage professionals use mobile 3D mapping to create permanent records of historic structures.
Conservation planning requires detailed condition assessment without damaging fragile surfaces. Non-contact mobile mapping documents deterioration patterns, structural deformation, and material loss while preserving the integrity of historic fabric.
Virtual access makes heritage sites available to researchers and the public worldwide. High-resolution digital twins enable detailed study without subjecting fragile structures to visitor traffic.
Restoration guidance provides contractors with precise measurements and surface documentation. When restoring historic details, craftspeople can reference exact dimensions and profiles captured in digital twins.
Disaster recovery planning benefits from pre-event documentation. If fire, flood, or structural failure damages heritage buildings, digital twins guide reconstruction efforts with unprecedented accuracy.
Overcoming Common Challenges in Mobile 3D Mapping
Managing Large Datasets and Processing Requirements
Mobile mapping generates enormous data volumes that challenge storage, processing, and distribution systems.
Data volume from a single day of scanning can reach hundreds of gigabytes or even terabytes. A comprehensive facility survey might capture 50-100 million points per floor plus thousands of high-resolution photographs. Managing these datasets requires robust storage infrastructure and efficient data management practices.
Processing time scales with dataset size and desired output quality. Converting raw scans to finished digital twins might take hours or days, depending on area covered and processing parameters. Cloud-based processing services distribute computational load across multiple servers, reducing turnaround times.
Data decimation reduces point density in areas where extreme detail isn't required. Intelligent decimation algorithms preserve edges, features, and high-curvature surfaces while thinning points in flat, featureless areas. This reduces file sizes without sacrificing useful information.
Level of detail (LOD) management creates multiple versions of digital twins optimized for different uses. High-resolution models support detailed measurement and analysis, while simplified versions enable smooth visualization on standard computers and mobile devices.
Dealing with Challenging Environments and Lighting Conditions
Not all environments cooperate with mobile mapping technology. Understanding limitations and mitigation strategies prevents failed surveys.
Reflective surfaces like glass, polished metal, and water confuse laser scanners. Mirrors create false geometry, while transparent glass may not return sufficient laser energy for reliable detection. Mitigation strategies include applying temporary dulling spray to critical surfaces or supplementing LiDAR data with photogrammetric reconstruction.
Extreme lighting challenges camera-based systems. Direct sunlight creates harsh shadows and blown-out highlights, while very dark areas may lack sufficient light for quality imagery. HDR imaging helps, but some situations require supplemental lighting or multiple capture passes at different exposure settings.[1]
Dynamic environments with moving people, vehicles, or equipment create noise in point clouds. Processing algorithms filter moving objects, but heavy traffic areas may require scanning during off-hours when activity is minimal.
GNSS-denied environments like underground facilities, dense urban canyons, or heavily forested areas prevent satellite positioning. In these situations, SLAM algorithms rely entirely on feature matching, making loop closures and reference targets especially important for maintaining accuracy.
Ensuring Accuracy Without Ground Control Networks
Traditional surveying establishes extensive control networks before data collection begins. Mobile mapping's speed advantage often means starting capture before formal control is available.
Self-contained accuracy from modern SLAM systems reaches 1-3 cm relative accuracy over short distances (under 100 meters) without any control points. This suffices for many applications, though absolute positioning may drift over longer traverses.
Opportunistic control uses existing features with known coordinates as reference points. Building corners shown on site plans, survey monuments, or previously established benchmarks provide control without requiring new survey work.
Closed-loop validation quantifies accuracy by measuring closure errors when paths return to starting points. If a 200-meter loop closes within 2 cm, the system is performing well. Large closure errors indicate problems requiring investigation.
Independent verification compares mobile mapping results against traditional survey measurements at key locations. Checking room dimensions, ceiling heights, and feature positions against conventional measurements validates digital twin accuracy.
The Future of Mobile 3D Mapping and Digital Twin Technology
Integration with AI and Automated Feature Extraction
Artificial intelligence transforms raw point clouds into intelligent digital twins that understand what they contain.
Automated classification identifies building components, MEP systems, furniture, and equipment without manual labeling. Machine learning models trained on millions of examples recognize patterns and assign semantic labels to point cloud regions.
Defect detection algorithms scan digital twins for cracks, staining, deformation, and other condition issues. For damp surveys and specific defect reports, AI-assisted analysis highlights areas requiring detailed investigation.
Change detection compares sequential scans to identify differences. Rather than manually reviewing entire models, automated algorithms highlight only areas where changes occurred, dramatically reducing analysis time.
Quantity extraction automatically measures areas, volumes, and counts from digital twins. AI-powered tools generate material takeoffs, space inventories, and asset counts with minimal human intervention.
Real-Time Processing and Edge Computing
Current mobile mapping workflows involve capturing data in the field, then processing it later in the office. Emerging technologies enable real-time processing during capture.
On-device processing uses powerful embedded computers to run SLAM algorithms and generate preliminary models while scanning. Operators see developing point clouds in real-time, enabling immediate quality checks and gap identification.
Edge computing distributes processing between mobile devices and nearby servers. Field systems handle time-critical SLAM calculations while offloading intensive tasks like mesh generation and texture mapping to local processing nodes.
Immediate feedback helps operators ensure complete coverage. Real-time visualization shows which areas have been captured and which still need scanning, preventing gaps that require return visits.
Expanding Accessibility for Small and Medium Firms
As mobile 3D mapping technology matures, costs decline and usability improves, making it accessible beyond large specialized firms.
Rental programs allow occasional users to access professional equipment without capital investment. Surveyors can rent mobile mapping systems for specific projects, paying only for actual usage.
Subscription processing eliminates the need for expensive workstations and software licenses. Cloud-based processing services charge per-project fees, making professional-quality results accessible to firms of all sizes.
Simplified workflows reduce the specialized expertise required for successful mobile mapping. Automated processing pipelines and intuitive interfaces enable surveyors to produce quality digital twins without extensive training in photogrammetry or point cloud processing.
Multi-purpose platforms justify investment by supporting diverse applications. The same backpack system that captures building surveys also documents roof surveys, construction progress, and facility conditions, maximizing equipment utilization.
Standards and Interoperability Developments
Industry-wide standards ensure digital twins created by different systems and vendors work together seamlessly.
Data exchange formats like E57, LAS, and LAZ provide vendor-neutral point cloud storage. Any software can read these formats, preventing vendor lock-in and enabling multi-tool workflows.
BIM standards including IFC (Industry Foundation Classes) ensure digital twins integrate with design and management platforms regardless of source. Standardized classification systems enable consistent asset labeling across projects and organizations.
Accuracy specifications help clients understand what they're purchasing. Organizations like ASTM and RICS develop standards defining accuracy requirements for various applications, enabling informed procurement decisions.
Metadata standards ensure digital twins include essential information about capture date, equipment used, processing methods, and accuracy estimates. This documentation supports long-term data management and quality assurance.
Conclusion

Mobile 3D Mapping: Creating Accurate Digital Twins for Indoor and Outdoor Surveys represents a fundamental shift in how construction professionals, surveyors, and facility managers document the built environment in 2026. By combining LiDAR sensors, high-resolution cameras, and sophisticated positioning systems on portable platforms, these technologies deliver professional-grade accuracy without the time penalties and workflow disruptions of traditional static scanning methods.[1]
The flexibility to seamlessly transition between indoor and outdoor environments using the same equipment streamlines project workflows and reduces costs. Whether documenting a single room for a structural survey or capturing an entire housing development with thousands of homes,[4] mobile mapping systems scale to match project requirements while maintaining sub-centimeter precision that supports engineering analysis and regulatory compliance.[3]
Taking Action: Getting Started with Mobile 3D Mapping
For surveyors and construction professionals ready to implement mobile 3D mapping, several practical steps accelerate successful adoption:
✅ Assess your project mix to identify applications where mobile mapping delivers the greatest value. Construction progress monitoring, as-built documentation, and facility management typically show immediate ROI.
✅ Start with rental or service providers before committing to equipment purchases. Experiencing mobile mapping on real projects clarifies requirements and builds internal expertise.
✅ Invest in training for both field capture and data processing. While modern systems are increasingly user-friendly, understanding best practices for route planning, loop closures, and quality control prevents costly mistakes.
✅ Establish data management procedures before datasets overwhelm storage capacity. Cloud-based processing and archival systems scale with growing data volumes.
✅ Integrate with existing workflows rather than treating digital twins as standalone deliverables. Connecting mobile mapping outputs to BIM platforms, GIS databases, and project management systems maximizes value.
The rapid evolution of mobile 3D mapping technology continues accelerating in 2026, with innovations in AI-powered feature extraction, real-time processing, and automated compliance checking expanding capabilities while reducing costs. As demonstrated by systems like Scan2Twin,[2] the future of digital twins extends beyond visualization to operational integration that supports daily facility management, emergency response, and strategic planning.
For surveying firms seeking competitive advantages in an increasingly digital construction industry, mobile 3D mapping offers a clear path forward. The technology delivers faster turnaround times, more comprehensive documentation, and new service opportunities that traditional methods cannot match. By adopting mobile mapping now, forward-thinking professionals position themselves as essential partners in the digital transformation reshaping how we design, build, and manage the physical world.
References
[1] 3d Mobile Mapping For Digital Twins Camera Features That Ensure Accuracy – https://www.e-consystems.com/blog/camera/applications/3d-mobile-mapping-for-digital-twins-camera-features-that-ensure-accuracy/
[2] Geoconvergence Introduces Scan2twin Mobile Mapping For Digital Twin Creation Gis Integration – https://www.geoweeknews.com/news/geoconvergence-introduces-scan2twin-mobile-mapping-for-digital-twin-creation-gis-integration
[3] Mapping The Future Of Digital Twins Transforming Transportation Cad To Gis – https://sanborn.com/blog/mapping-the-future-of-digital-twins-transforming-transportation-cad-to-gis/
[4] Mapping A New Town With 3d Digital Twin Technology – https://www.gim-international.com/content/news/mapping-a-new-town-with-3d-digital-twin-technology